News
Comment: Measure distance with ST’s VL53L1X distance sensor

Creating “colour” images is not new. Microsoft’s Kinect sensor introduced developers to getting spatial information: a trick which STMicroelectronics now makes manageable via its laser-based distance sensor monoliths, which are ideally suited to drone landing sensors, distance-sensitive ignitors and other trinkets.
All in one…
Unlike the sensor used in the Kinect, ST’s sensor is “one-dimensional”. The optical window at the top of the chip acts as viewfinder and emitter, while distance to “objects” in front of the detector is returned as a one-dimensional value (think: something is 50cm away from me).
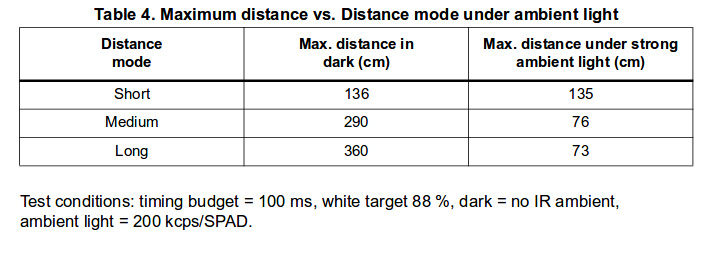
Furthermore, the use of laser technology makes the system almost completely independent of the target material – the colour-related problems known from classic IR components should not occur here.
Host-Sensor connectivity is accomplished via the I2C bus: sadly, ST does not expose an address selector, thereby limiting you to one sensor per bus controller. The actual communication protocol is described in a separate document: as ST loves to change its URL schemes, simply google for UM2356 to find it – (but “while not exposing any address selectors in hardware, it is possible to select address through commands during sensor startup”, according to a comment posted below by Martin Palsson, who included more details (scroll down)).
Furthermore, a driver written in C is made available to aid implementors.
While current consumption is moderate in the range of less than 20mA when active, users must be aware of the maximum supply voltage of 3V5. This makes integrating the system into 5V I2C busses difficult – a level shifter made up of two FETs is a workaround (see directionalLevelShifter and application-note).
Calibrate me!
Most sensors require modifications to case design: without a cutout “to look out from”, all kinds of strange problems occur. ST simplifies this by a dedicated calibration routine, which should be run on every unit in the factory. This also weeds out individual optical differences in the “window”, and accounts for any changes caused by reflowing.
Another nice aspect is the ability to set the “region of interest”. While the field of view, by default, is quite wide, the optical array can be tuned to limit it. In an eery similarity to the above-mentioned Kinect, detection range also is specified in “classes”.
The only disadvantage of the part is the insanely small footprint. ST uses a non-leaded case (Optical LGA) which is but 4.9×2.5×1.56 mm small: while the package can be reflowed with ease, fitting it to a prototype using a soldering station is borderline impossible.
As with all new chips, availability is an issue. On OEMsecrets, prices range from 2.8€ to 5€ in small quantities – as always, a price comparison is your wallet’s friend. See below!
Ing. Tam HANNA…has worked in the embedded space since the time when the PIC 16F84A was hot. After a few years of mobile computing, his consulting company Tamoggemon Holding k.s. has refocused on hardware design.
See also: ST ToF sensor extends FlightSense detection range to 4m